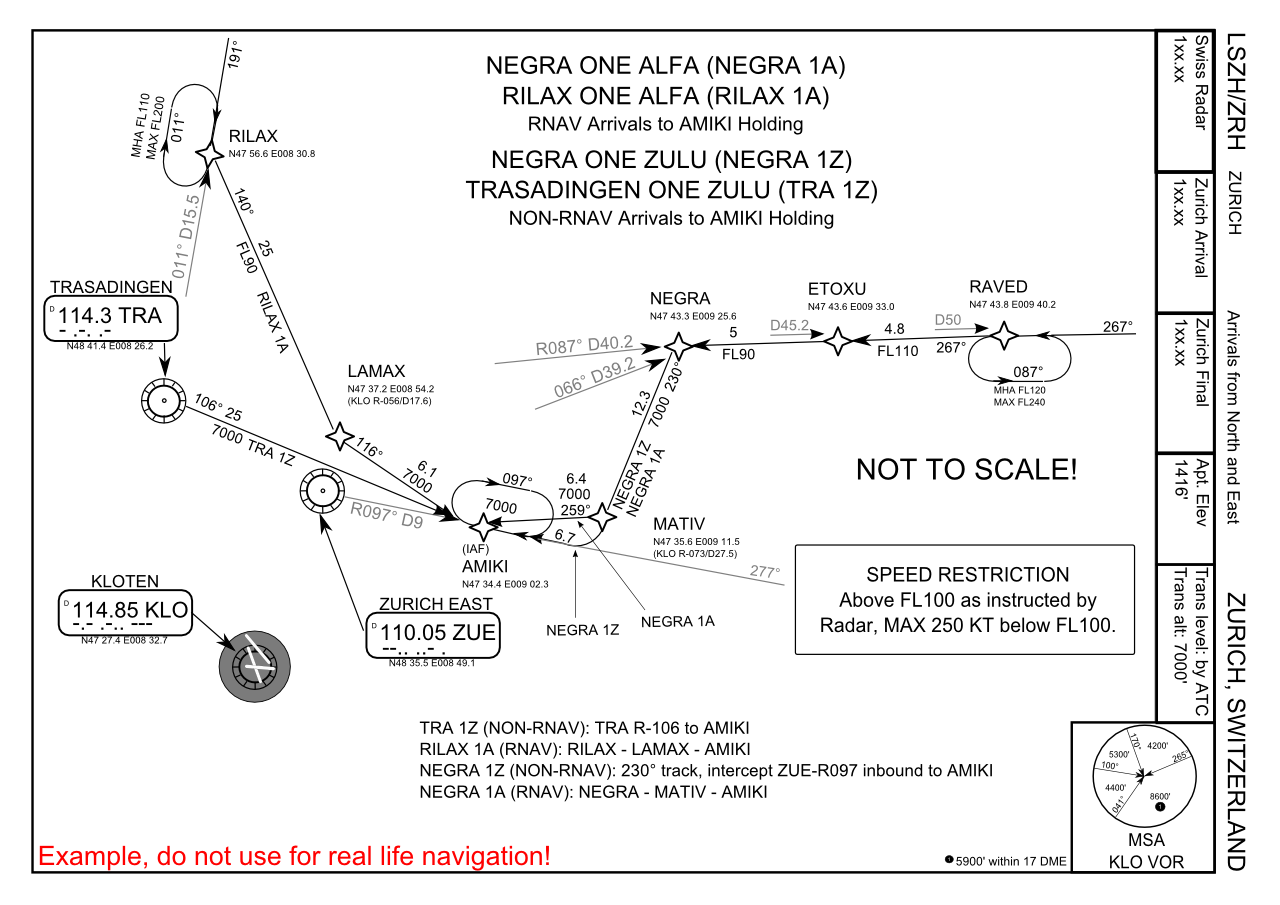
Precisión de rutas RNAV y vectorizacion de aeronaves en SIDS y STARS
La precisión con la que se vuela
un procedimiento RNAV depende de la radioayuda
utilizada, de la calidad de los sensores
de abordo y de la base de datos del sistema.
A pesar de que existe un formato
estándar (ARINC 424), la codificación de un procedimiento RNAV SID o STAR en
una base de datos o la interpretación de la codificación de dicha base de datos puede variar ligeramente.
Las diferencias en las bases de
datos junto con las variaciones en el rendimiento de las aeronaves pueden dar
lugar a pequeñas diferencias en las trayectorias RNAV entre aeronaves que
realicen el mismo procedimiento.
Esto será más evidente durante los giros y donde se utilizan puntos de referencia de sobrevuelo. Aun así, las trayectorias definidas por una aeronave usando equipamiento RNAV deben de ser tan precisas o más que, las de las aeronaves que vuelan rutas convencionales. De hecho RNAV se utiliza a menudo para volar procedimientos en rutas y llegadas convencionales.
Esto será más evidente durante los giros y donde se utilizan puntos de referencia de sobrevuelo. Aun así, las trayectorias definidas por una aeronave usando equipamiento RNAV deben de ser tan precisas o más que, las de las aeronaves que vuelan rutas convencionales. De hecho RNAV se utiliza a menudo para volar procedimientos en rutas y llegadas convencionales.
A la hora de diseñar rutas, los
expertos tienen en cuenta diversos factores para proteger a la aeronave y sus
ocupantes de los riesgos de colisión
contra otras aeronaves y con el terreno. La separación horizontal es de suma
importancia para la creación de rutas paralelas. Uno de los métodos usados en
el pasado consistía en el cálculo de los errores máximos de las estaciones VOR para diseñar los límites laterales de las
rutas. En la ilustración inferior se puede ver como un avión se encuentra en el
límite del error máximo de una estación VOR en particular.
Imaginemos que el error de esa
estación que nos muestra la ilustración es de +/-7.5°

Para asegurarnos entonces que la
aeronave permanezca dentro de un rango
de 5 millas náuticas a uno y otro lado de la ruta seleccionada, es necesario
tener en cuenta que la señal del VOR no puede ser usada más allá de las 40
millas náuticas, tal y como se puede calcular con una sencilla regla de tres y
teniendo en cuenta la famosa “1-in 60 rule”.
Hoy en día se trabaja de forma más
precisa con sistemas de posicionamiento global y se utilizan métodos y modelos
matemáticos muy sofisticados. Una de las cuestiones que se tienen en cuenta a
la hora de diseñar las rutas RNAV y la posición de los WP es la relativa a las
prestaciones de la aeronave. No todos los aviones comerciales reaccionan de la
misma manera cuando tienen que sobrevolar un WP y luego se dirigen al siguiente
fijo.
Además de las prestaciones de la
aeronave (capacidad de alabeo, velocidad, etc.) existen muchos otros factores
externos como el viento, que pueden hacer desviar a una aeronave más que a
otra.

Es relativamente sencillo entrenar
a los pilotos a efectuar un giro cuando sobrevuelan un WP. La mayoría de los
pilotos bien entrenados son capaces de mantener una velocidad constante y un ángulo
de alabeo determinado incluso en condiciones meteorológicas muy adversas. Aun
así los patrones de repetición de la trayectoria no serían exactos en todos y
cada uno de los vuelos.
La razón estriba en que las
trayectorias no se realizan sobre un espacio bidimensional, como por ejemplo un
mapa o una carta aeronáutica. Esto es lo que los matemáticos describirían como
geometría euclídea (en un espacio plano o de dos dimensiones). Los diseños de
las rutas y procedimientos en realidad se diseñan para ser ejecutados sobre la
tierra que es cuasi-esférica, o en otras palabras, un espacio tridimensional o
no euclídeo donde las trayectorias no son las mismas que en los espacios de dos
dimensiones (la distancia más corta entre dos puntos ya no es la línea recta,
sino una curva). Los cálculos de alabeo y velocidad para que todos los vuelos y
sus trayectorias sean casi los mismos se complican enormemente. Es por ello que
las rutas y procedimientos RNAV están diseñados para ser volados con el sistema
de gestión de vuelo FMS y haciendo uso del máximo nivel de automatismo posible
en esa fase de vuelo.
En la ilustración inferior
se muestran algunas de las características de diseño que son comunes hoy en día
para procedimientos RNAV avanzados.



Comentarios
Publicar un comentario