El funcionamiento del piloto automático (en plan sencillo) parte III
 En artículos anteriores habíamos dicho que para controlar un piloto automático, lo que había que hacer era "tocar" o inclinar los giroscopios para que estos generaran un error que debía de ser compensado. Mover un giroscopio cuando rota es muy difícil porque estos dispositivos adquieren propiedades muy curiosas. Esta propiedad se llama precesión giroscópica. Cuando se trata de inclinar uno de estos giroscopios, la reacción que se genera es muy distinta de lo que uno pueda pensar. Vamos a ver por qué sin meternos en muchas profundidades.
En artículos anteriores habíamos dicho que para controlar un piloto automático, lo que había que hacer era "tocar" o inclinar los giroscopios para que estos generaran un error que debía de ser compensado. Mover un giroscopio cuando rota es muy difícil porque estos dispositivos adquieren propiedades muy curiosas. Esta propiedad se llama precesión giroscópica. Cuando se trata de inclinar uno de estos giroscopios, la reacción que se genera es muy distinta de lo que uno pueda pensar. Vamos a ver por qué sin meternos en muchas profundidades.
En el clip se pude ver una demostración para que los alumnos aspirantes a pilotos se familiaricen con la precesión giroscópica. En el vídeo se muestra una rueda de bicicleta que se encuentra suspendida por una cuerda en uno solo de sus extremos. Cuando la rueda no gira se comporta como cualquier otro cuerpo, pero cuando adquiere un giro lo suficientemente rápido, adquiere propiedades giroscópicas.
Sorprendente, la rueda se queda en posición vertical porque trata de permanecer estable (es la conocida propiedad denominada rigidez en el espacio), pero ¿Por qué gira en el plano horizontal la rueda? Bueno, esa es la otra propiedad denominada precesión giroscópica. La parte que no está atada sufre la fuerza de la gravedad (hacia abajo), pero esta fuerza se transfiere a la rueda y el giro de esta hace que en realidad la fuerza sea aplicada 90° en la dirección del giro. ver imagen debajo.

En la ilustración inferior se puede ver lo que ocurre cuando se aplica una fuerza de abajo a arriba a una masa giratoria. La fuerza se aplica al eje.
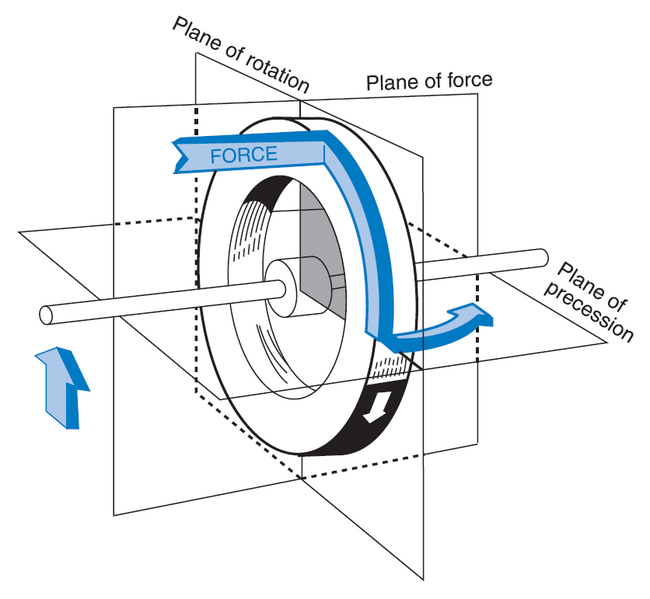 |
| Al intentar mover el eje hacia arriba en la dirección de la flecha, esta fuerza se traslada al disco giratorio y de ahí 90° en el sentido del giro. El resultado es que dicha fuerza no moverá el eje en el plano vertical, sino que lo hará en el plano horizontal y hacia la derecha. |
El sistema encargado de "tocar" de la mejor forma posible estos giróscopos del avión es el FCC o Flight Control Computer (o alguna variante). En algunos aviones recibe un nombre diferente, pero su misión básicamente es la misma. Los sistemas giroscópicos que se encuentran en los sistemas IRS suelen ser hoy en día electrónicos. Antiguamente eran mecánicos (principalmente en los INS) y cuanto mayor fuera su velocidad de rotación más estables eran. Al ser mecanismos muy complejos y mecánicos requerían mucho mantenimiento y eran bastante delicados y sensibles a cambios de temperatura, golpes, etc. Los modernos IRS no tienen esos problemas al ser electrónicos.
 |
| El FCC es el computador de vuelo que "sabe" tocar el giroscopio para que este genere la señal de error adecuada. |
El sistema de auto-estabilización de un piloto automático es lo que se conoce como un "closed loop" en inglés o un sistema de circuito cerrado en Español. Se puede ver un esquema en el dibujo de abajo.
 |
| En un "closed loop" el sistema puede "sentir" cualquier desviación desde la posición de estabilidad predefinida. El sensor, que normalmente es un giróscopo, manda una señal por medio de un transductor. Esta señal a menudo es muy débil y necesita ser amplificada (triángulo). La señal entra en el FCC y este mueve los controles de vuelo. Estos últimos a su vez generan una retroalimentación (feedback) al computador y el efecto aerodinámico también es detectado por el sensor. |
El piloto humano puede elegir entre volar el mismo los parámetros deseados o delegar estas funciones al piloto automático. Si el piloto decide intervenir, se dice que es un "open loop" o lazo abierto porque el piloto humano toma el control pudiendo o no desviarse de los parámetros elegidos.

El eje dedicado al alabeo (roll) funciona exactamente igual que el del pitch, pero esta vez la estabilización se produce en el eje longitudinal del avión.El giróscopo "siente" la desviación y la neutraliza a través de las señales enviadas al FCC (a través del canal dedicado) que en última instancia es el que manda las señales para aplicar potencia hidráulica a los servo-actuadores y así mover los alerones.

El eje de guiñada es un poco diferente, pues usa un giróscopo horizontal dedicado que recibe un nombre especial. Es conocido como "Rate Gyro" o giróscopo de gradiente. Este tipo de giróscopo "siente" cualquier tipo de desplazamiento que se quiera efectuar en el eje normal o vertical del avión. Este es el eje denominado de guiñada (Yaw en inglés). Como se puede ver en la ilustración inferior, cualquier intento de mover al giróscopo ene l plano horizontal (en este caso es hacia la izquierda), la precesión giroscópica hará que el eje de giro del giróscopo se incline. En virtud de la propiedad de precesión giroscópica antes vista, si el giróscopo gira de atrás adelante en el sentido de la marcha, entonces cualquier guiñada hacia la derecha hará que el eje de giro se desplaza hacia arriba. Esta señal transmitida por un resolver (ver parte I) y debidamente amplificada, se manda al computador de vuelo.

 Este sistema es especial, porque es el encargado de amortiguar un efecto poco deseable denominado bataneo del holandés o Dutch Roll en inglés. Este amortiguamiento o supresión de tal efecto recibe la denominación inglesa de "Yaw Damper". En la imagen de la silueta se puede ver el famoso bataneo o Dutch roll. El objetivo es detener este movimiento por medio de los giróscopos intentando que el avión se situe permanentemente dentro del círculo rojo (cero bataneo). Para poder efectuar las correcciones pertinentes, el FCC en este caso necesita además del giróscopo una serie de parámetros como son la velocidad del avión y la densidad del aire. Para ello el ADC (ver post dedicado) entrega estos datos al FCC.
Este sistema es especial, porque es el encargado de amortiguar un efecto poco deseable denominado bataneo del holandés o Dutch Roll en inglés. Este amortiguamiento o supresión de tal efecto recibe la denominación inglesa de "Yaw Damper". En la imagen de la silueta se puede ver el famoso bataneo o Dutch roll. El objetivo es detener este movimiento por medio de los giróscopos intentando que el avión se situe permanentemente dentro del círculo rojo (cero bataneo). Para poder efectuar las correcciones pertinentes, el FCC en este caso necesita además del giróscopo una serie de parámetros como son la velocidad del avión y la densidad del aire. Para ello el ADC (ver post dedicado) entrega estos datos al FCC.


genial
ResponderEliminarMuchas gracias :)
EliminarUn cordial saludo
Manolo