El funcionamiento del piloto automático (en plan sencillo) parte I
 El piloto automático se inventó para ayudar al piloto en las tareas rutinarias de control de vuelo. Una cabina de vuelo puede ser un ambiente extremadamente exigente en términos de atención. Con la adopción de nuevos sistemas de navegación y gestión de vuelo, el piloto se ha convertido más en un gestor de recursos que en un piloto propiamente dicho. Existen muchas tareas que pueden ser delegadas para no sobrecargar al piloto y que este se centre en otro tipo de parámetros más importantes, como son la seguridad, el confort, la economía, etc.
El piloto automático se inventó para ayudar al piloto en las tareas rutinarias de control de vuelo. Una cabina de vuelo puede ser un ambiente extremadamente exigente en términos de atención. Con la adopción de nuevos sistemas de navegación y gestión de vuelo, el piloto se ha convertido más en un gestor de recursos que en un piloto propiamente dicho. Existen muchas tareas que pueden ser delegadas para no sobrecargar al piloto y que este se centre en otro tipo de parámetros más importantes, como son la seguridad, el confort, la economía, etc.
Los pilotos automáticos son en realidad más antiguos de lo que la mayoría de la gente piensa. Su uso es casi tan antiguo como la aviación misma. Se conoce ya algún piloto automático de la casa Sperry que data de 1912. Estos sistemas eran muy básicos y solo podían efectuar pequeñas estabilizaciones y maniobras, pero el principio de funcionamiento de los complejos sistemas de hoy en día es básicamente el mismo: estabilización.
Desarrollo histórico
 |
| Curtiss B-2 en vuelo |
Hermann Anschuetz (en 1904) y Elmer Sperry (en 1908) descubrieron las posibles aplicaciones de las propiedades de unos dispositivos llamados giróscopos o giroscopios. Este logro técnico permitía obtener una referencia estable del curso o rumbo de una nave o aeronave. Fue empleado primeramente a bordo de buques, ya que el acero y los metales de los que se construyen los barcos afectaban a las propiedades magnéticas de la ferrita haciendo de la brújula un instrumento poco fiable.
Elmer Sperry desarrolló posteriormente el primer sistema de control automático llamado girocompás que rápidamente se impuso en el sector del transporte marítimo. Sin embargo fue el piloto automático, lo que realmente se estableció rápidamente como un estándar en la construcción de nuevas aeronaves después de que Lawrence, el hijo de Elmer Sperry, demostrara el 18 de junio de 1914 en Francia el primer sistema a bordo de un Curtiss B-2. Este aparato fue capaz de mantener el vuelo horizontal sin la intervención del piloto haciendo volar al biplano en condición estable. Este primer piloto automático consistió en cuatro giroscopios separados, cada uno que giraba a 7.000 revoluciones por minuto. Debido al rápido desarrollo tecnológico, especialmente en la electrónica, en 1947 se construyó el primer piloto automático electrónico para los C-54 Skymaster de la Fuerza Aérea de Estados Unidos. Estos aparatos llegaron a volar sobre el Atlántico desde los EE.UU. a Al Reino Unido de forma totalmente autónoma desde el despegue hasta el aterrizaje. En ese momento la prensa especializada británica mostró al mundo la capacidad del vuelo completamente automático.
En las fotos siguientes se pueden ver distintos tipos de paneles de control para la selección de los modos de operación de un piloto automático.
 |
| En este antiguo interfaz (probablemente de principios de los 70) se pueden ver los botones de selección de diferentes modos de vuelo con piloto automático. A la izquierda se puede ver el botón de conexión/desconexión del Piloto Automático (A/P). En el centro los modos de rumbo (HDG - Heading), navegación (NAV), aproximación (APPR), altitud (ALT), senda de planeo (GS). |
 |
| Un panel de control de piloto automático más moderno de la casa Bendix/King, instalado en una avioneta del tipo Cessna o Piper. |
 |
| El panel de control de guiado en un moderno Airbus A380 |
Como se puede apreciar todos los paneles tienen unos botones pulsadores y algunos llevan instalados también botones giratorios con ventanitas donde se puede ver la selección realizada a través de estos. Aunque viendo estos paneles tan diferentes pueda parecer lo contrario, todos los pilotos automáticos se basan en los mismos principios básicos.
Principio básico de todo piloto automático
Principio básico de todo piloto automático
El principio básico numero uno es la estabilización. Sin estabilización no puede haber control.
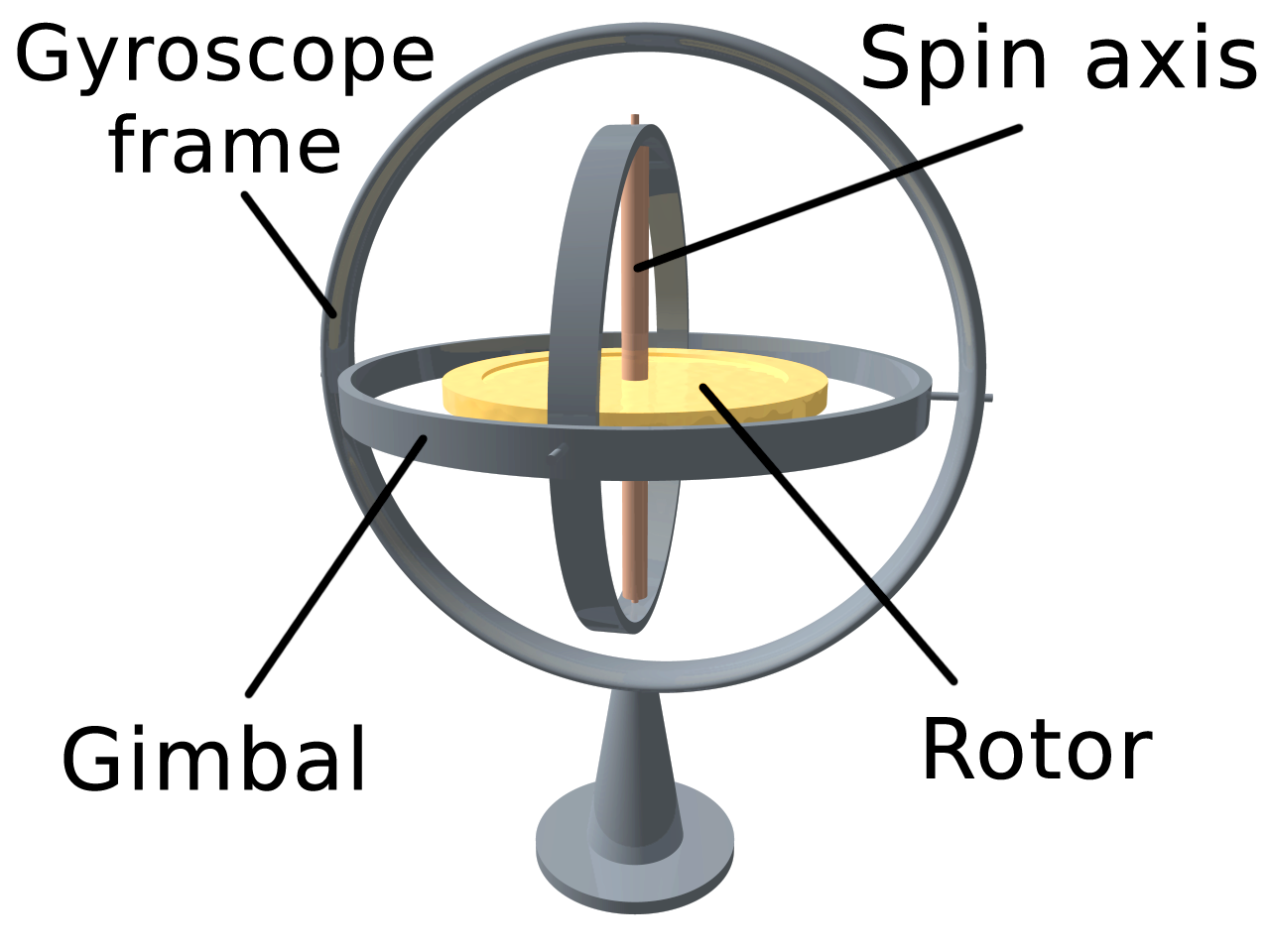
 Como se comentaba más arriba existe algo conocido como giroscopio o giróscopo que precisamente hace eso. El ejemplo que todo el mundo tienen en mente es la famosa peonza o trompo. El giróscopo o giroscopio (Del griego "skopeein = ver" y "gyros = giro") es un dispositivo mecánico que sirve para medir, mantener o cambiar la orientación en el espacio de algún aparato o vehículo.
Como se comentaba más arriba existe algo conocido como giroscopio o giróscopo que precisamente hace eso. El ejemplo que todo el mundo tienen en mente es la famosa peonza o trompo. El giróscopo o giroscopio (Del griego "skopeein = ver" y "gyros = giro") es un dispositivo mecánico que sirve para medir, mantener o cambiar la orientación en el espacio de algún aparato o vehículo.
Está formado esencialmente por un cuerpo con simetría de rotación que gira alrededor del eje de dicha simetría. Si está montado sobre un soporte Cardan, que no es otra cosa que una especie de marco articulado sobre el que se puede pivotar, tal como se ve en la animación. (Gimbal en inglés), o si simplemente un giróscopo gira libre en el espacio, este conserva la orientación de su eje de rotación ante fuerzas externas que tiendan a desviarlo.
Estos dispositivos presentan dos propiedades fundamentales: la inercia giroscópica o "rigidez en el espacio" y la precesión, que es la inclinación del eje en ángulo recto ante cualquier fuerza que tienda a cambiar el plano de rotación. Estas propiedades se manifiestan a todos los cuerpos en rotación, incluida la Tierra. El término giróscopo se aplica generalmente a objetos esféricos o en forma de disco montados sobre un eje, de forma que puedan girar libremente en cualquier dirección; estos instrumentos se emplean para demostrar las propiedades anteriores, para indicar movimientos en el espacio, o para producirlos.
Éste fenómeno físico, el efecto giroscópico, puede observarse fácil y cotidianamente en peonzas, o monedas lanzadas a rodar, por ejemplo, aunque por supuesto, cualquier objeto giratorio funciona en cierto modo, como giróscopo. El giro en vuelo impartido por el jugador a un un balón de rugby, o el de una bala disparada desde un arma de ánima rayada para estabilizar su trayectoria son otros ejemplos de aplicación del efecto.

Así que ya tenemos una referencia en el espacio que es estable y sobre la que podemos movernos alrededor sabiendo que esta referencia siempre nos va a indicar el punto al que hayamos previsto que apunte. Si sustituimos el soporte (marco articulado o gimbal) del giróscopo por la estructura del avión, entonces podremos mover el avión en cualquiera de sus tres ejes fundamentales, cabeceo (pitch), alabeo (roll) y guiñada (yaw), y la referencia seguirá siendo estable, tal como ocurre con los instrumentos de vuelo denominados horizonte artificial y girocompás. Lo normal es montar un giroscopio en la posición donde se encuentre la intersección de los tres ejes, que no es otra cosa que el centro de gravedad de la aeronave. Ver dibujo.


desde el giróscopo se pueden mandar señales eléctricas que nos indiquen la referencia en cabina. dichas señales se pueden ,andar también a calculadores de vuelo (FCC o Flight Control Computers). Pero existe un problema: ¿Cómo mandar las señales desde el giroscopio montado en el avión a la cabina de mando (o al ordenador) para poder ver la referencia en un horizonte artificial? Solución: el resolver (llamado también Selsyn o Synchro en inglés, que son variaciones del mismo elemento).

El resolver
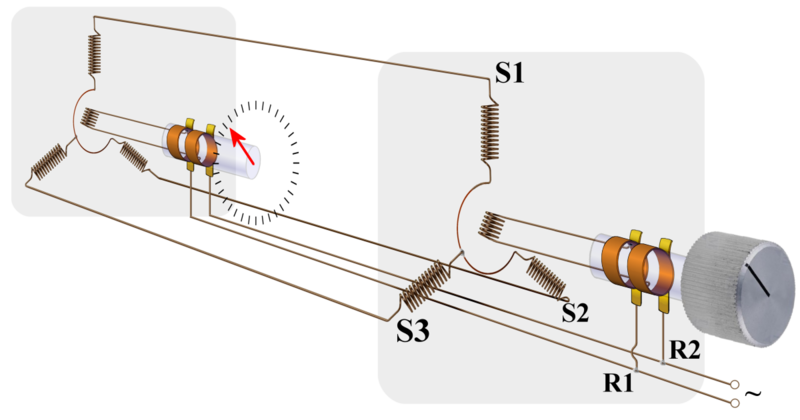
Un resolver parece un pequeño motor eléctrico. A veces es conocido con el rimbombante nombre de "transductor de campo giratorio", pero es en realidad una máquina eléctrica bastante sencilla en la que se conecta una resistencia o potenciómetro (a la izquierda en el diagrama) con un sistema de bobinas estáticas (llamadas estatores) que contienen un imán que es el que se mueve influido por el campo generado por las bobinas estáticas (parte derecha del circuito).

Tal como se aprecia en el diagrama, al mover el reostato hacía la izquierda unos grados, se genera una corriente eléctrica (tensión de salida) que cambia el campo magnético de las bobinas estáticas, con lo que el imán cambia de posición exactamente con el mismo ángulo. Si ponemos una escala o dial y le ponemos una aguja indicadora encima del imán, podremos ver la cantidad de señal que hemos generado desde el reostato. Acabamos de mandar una señal desde nuestro panel de control al piloto automático :) Los resolver tienen muchos usos y aplicaciones diferentes (no solo en aviación). Los resolver nos pueden servir para medir valores angulares, pero también para ver dichos valores en los instrumentos del cockpit, como por ejemplo la posición de una superficie de control o la posición de un selector determinado. Esto se muestra en la ilustración siguiente.
La gran ventaja de estos dispositivos es que pueden estar muy alejados y en posiciones totalmente distintas sin tener que estar alineados, ya que la señal se transmite por cableado eléctrico.

Uno de los extremos se suele denominar TX, que es la contracción de "transmisor" en inglés, y al otro RX que es el receptor. Girar un selector en el panel de guiado de un avión significa transmitir una señal por medio de uno de estos dispositivos. En la imagen se puede ver el aspecto de uno de estos dispositivos, preparado para una frecuencia de 400 ciclos y 115 V.

Otra de las ventajas de estos dispositivos es que son eléctricos y mandan señales continuas. No son digitales. Como todo el mundo sabe, la digitalización implica pérdida de información. esto es lo que sucede con los formatos de música MP3, por ejemplo. Con la señal eléctrica no ocurre esto, ya que se trata de una señal continua, o en otras palabras, es fiel reflejo de lo que ocurre al otro lado del resolver. Los resolvers convencionales cuentan con escobillas, pero hoy día casi todos son de tipo sincro, es decir no tienen contacto ninguno entre el rótor y el estátor. Estos Sincros ofrecen una precisión mucho mayor y como no tienen partes móviles sujetas a desgaste, son muy fiables.
En la siguiente parte veremos como manejar estos dispositivos y su relación con los giróscopos.
------------------- Parte II --------------
El funcionamiento de un piloto automático se basa en la estabilización creada por una referencia, tal cual vimos en la primera parte de esta serie de artículos. Cuando el piloto (humano) selecciona un modo de operación a través del panel de guiado, le está diciendo al piloto automático (si está conectado) precisamente lo que debe de hacer. Pero en realidad ¿Cómo sucede esto?

En plan sencillo y sin complicaciones. Para este ejemplo vamos a considerar solamente el eje lateral del avión, que es el eje de cabeceo o pitch en inglés.Tenemos un giróscopo vertical montado en el centro de gravedad del avión. El propio eje vertical del giróscopo forma parte de un sistema eléctrico y el extremo de este eje toca la parte central de un reostato (resistencia), que se encuentra colocada en el fuselaje del avión, tal cual se puede ver en el dibujo inferior.

El sistema está en reposo, ya que no se genera señal eléctrica alguna. Epsilon = 0. No se necesita que el estabilizador horizontal corrija nada. No hay señal. Imaginemos ahora que sufrimos una ráfaga de viento (down drafts) que empuja el morro de nuestro avión hacia abajo. El morro del avión baja, pero el giróscopo mantiene su posición en el espacio (esa es su propiedad principal llamada rigidez en el espacio), esto es lo que se puede ver en el dibujo siguiente.

El efecto del cabeceo hace que el avión gire sobre su eje lateral (bajando el morro) de forma que el potenciómetro (que es el propio avión) también gire. El giroscopio sigue apuntando su eje verticalmente con respecto a la tierra, pero esto genera una señal eléctrica o error, que debe de ser corregido. Dependiendo de la cantidad de señal generada se aplicará una corrección al estabilizador horizontal, hasta que la señal vuelva a ser cero. Este es el principio básico de todo piloto automático: la estabilización. Esto mismo es lo que sucede en todos los ejes del avión. Con un sistema de auto-estabilización el avión corregirá automáticamente cualquier desviación producida por elementos externos.
Bien, pero entonces ¿Cómo podemos decirle al piloto automático que haga lo que nosotros queremos? Si el sistema está auto-estabilizado entonces nos corregirá cualquier "input" o selección que podamos hacer. Es cierto, por eso mismo debemos de engañar al giróscopo. En otras palabras, debemos de introducir una señal de error en el sistema para que el propio giróscopo la compense.
Bien, pero entonces ¿Cómo podemos decirle al piloto automático que haga lo que nosotros queremos? Si el sistema está auto-estabilizado entonces nos corregirá cualquier "input" o selección que podamos hacer. Es cierto, por eso mismo debemos de engañar al giróscopo. En otras palabras, debemos de introducir una señal de error en el sistema para que el propio giróscopo la compense.
Si el sistema es estable, entonces "toca" el giroscopio para crear una señal de error. Si "tocamos" el giróscopo y lo inclinamos 3°, estaremos produciendo un error (epsilon) que deberá ser compensado por el estabilizador horizontal (los elevadores en este caso).

En realidad lo que hacemos es crear pequeños errores que deben de ser corregidos. Esto lo hace el computador de abordo o Flight Control Computer (FCC) o algún elemento similar, tal como se puede ver en la ilustración inferior. Los giroscopios de todos los ejes del avión van montados en el centro del mismo (o muy cerca del centro) dentro de un sistema que se denomina Inercial o de Referencia (INS o IRS). El piloto utiliza el Panel de Guiado (Guidance Panel o Mode Control Panel) para introducir estos pequeños errores, los cuales son enviados al IRS por medio del computador de vuelo o FCC o similar. En el ejemplo de abajo se ve un avión ascendiendo a 20.000 pies seleccionados en la ventanilla del MCP. Al llegar a esa altura el FCC dejará de enviar la señal de error y el avión se auto-estabilizará a 20.000 pies de altura.

En los siguientes artículos sobre el tema vamos a profundizar más en estos conceptos.
------------------ Parte III ----------------
 En artículos anteriores habíamos dicho que para controlar un piloto automático, lo que había que hacer era "tocar" o inclinar los giroscopios para que estos generaran un error que debía de ser compensado. Mover un giroscopio cuando rota es muy difícil porque estos dispositivos adquieren propiedades muy curiosas. Esta propiedad se llama precesión giroscópica. Cuando se trata de inclinar uno de estos giroscopios, la reacción que se genera es muy distinta de lo que uno pueda pensar. Vamos a ver por qué sin meternos en muchas profundidades.
En artículos anteriores habíamos dicho que para controlar un piloto automático, lo que había que hacer era "tocar" o inclinar los giroscopios para que estos generaran un error que debía de ser compensado. Mover un giroscopio cuando rota es muy difícil porque estos dispositivos adquieren propiedades muy curiosas. Esta propiedad se llama precesión giroscópica. Cuando se trata de inclinar uno de estos giroscopios, la reacción que se genera es muy distinta de lo que uno pueda pensar. Vamos a ver por qué sin meternos en muchas profundidades.En el clip se pude ver una demostración para que los alumnos aspirantes a pilotos se familiaricen con la precesión giroscópica. En el vídeo se muestra una rueda de bicicleta que se encuentra suspendida por una cuerda en uno solo de sus extremos. Cuando la rueda no gira se comporta como cualquier otro cuerpo, pero cuando adquiere un giro lo suficientemente rápido, adquiere propiedades giroscópicas.
Sorprendente, la rueda se queda en posición vertical porque trata de permanecer estable (es la conocida propiedad denominada rigidez en el espacio), pero ¿Por qué gira en el plano horizontal la rueda? Bueno, esa es la otra propiedad denominada precesión giroscópica. La parte que no está atada sufre la fuerza de la gravedad (hacia abajo), pero esta fuerza se transfiere a la rueda y el giro de esta hace que en realidad la fuerza sea aplicada 90° en la dirección del giro. ver imagen debajo.

En la ilustración inferior se puede ver lo que ocurre cuando se aplica una fuerza de abajo a arriba a una masa giratoria. La fuerza se aplica al eje.
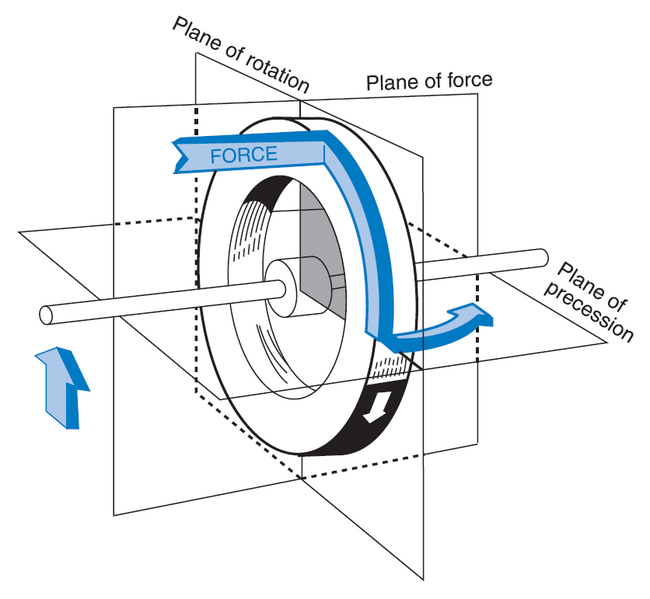 |
| Al intentar mover el eje hacia arriba en la dirección de la flecha, esta fuerza se traslada al disco giratorio y de ahí 90° en el sentido del giro. El resultado es que dicha fuerza no moverá el eje en el plano vertical, sino que lo hará en el plano horizontal y hacia la derecha. |
El sistema encargado de "tocar" de la mejor forma posible estos giróscopos del avión es el FCC o Flight Control Computer (o alguna variante). En algunos aviones recibe un nombre diferente, pero su misión básicamente es la misma. Los sistemas giroscópicos que se encuentran en los sistemas IRS suelen ser hoy en día electrónicos. Antiguamente eran mecánicos (principalmente en los INS) y cuanto mayor fuera su velocidad de rotación más estables eran. Al ser mecanismos muy complejos y mecánicos requerían mucho mantenimiento y eran bastante delicados y sensibles a cambios de temperatura, golpes, etc. Los modernos IRS no tienen esos problemas al ser electrónicos.
|
| El FCC es el computador de vuelo que "sabe" tocar el giroscopio para que este genere la señal de error adecuada. |
El sistema de auto-estabilización de un piloto automático es lo que se conoce como un "closed loop" en inglés o un sistema de circuito cerrado en Español. Se puede ver un esquema en el dibujo de abajo.
 |
| En un "closed loop" el sistema puede "sentir" cualquier desviación desde la posición de estabilidad predefinida. El sensor, que normalmente es un giróscopo, manda una señal por medio de un transductor. Esta señal a menudo es muy débil y necesita ser amplificada (triángulo). La señal entra en el FCC y este mueve los controles de vuelo. Estos últimos a su vez generan una retroalimentación (feedback) al computador y el efecto aerodinámico también es detectado por el sensor. |
El piloto humano puede elegir entre volar el mismo los parámetros deseados o delegar estas funciones al piloto automático. Si el piloto decide intervenir, se dice que es un "open loop" o lazo abierto porque el piloto humano toma el control pudiendo o no desviarse de los parámetros elegidos.

El eje dedicado al alabeo (roll) funciona exactamente igual que el del pitch, pero esta vez la estabilización se produce en el eje longitudinal del avión.El giróscopo "siente" la desviación y la neutraliza a través de las señales enviadas al FCC (a través del canal dedicado) que en última instancia es el que manda las señales para aplicar potencia hidráulica a los servo-actuadores y así mover los alerones.

El eje de guiñada es un poco diferente, pues usa un giróscopo horizontal dedicado que recibe un nombre especial. Es conocido como "Rate Gyro" o giróscopo de gradiente. Este tipo de giróscopo "siente" cualquier tipo de desplazamiento que se quiera efectuar en el eje normal o vertical del avión. Este es el eje denominado de guiñada (Yaw en inglés). Como se puede ver en la ilustración inferior, cualquier intento de mover al giróscopo ene l plano horizontal (en este caso es hacia la izquierda), la precesión giroscópica hará que el eje de giro del giróscopo se incline. En virtud de la propiedad de precesión giroscópica antes vista, si el giróscopo gira de atrás adelante en el sentido de la marcha, entonces cualquier guiñada hacia la derecha hará que el eje de giro se desplaza hacia arriba. Esta señal transmitida por un resolver (ver parte I) y debidamente amplificada, se manda al computador de vuelo.

 Este sistema es especial, porque es el encargado de amortiguar un efecto poco deseable denominado bataneo del holandés o Dutch Roll en inglés. Este amortiguamiento o supresión de tal efecto recibe la denominación inglesa de "Yaw Damper". En la imagen de la silueta se puede ver el famoso bataneo o Dutch roll. El objetivo es detener este movimiento por medio de los giróscopos intentando que el avión se situe permanentemente dentro del círculo rojo (cero bataneo). Para poder efectuar las correcciones pertinentes, el FCC en este caso necesita además del giróscopo una serie de parámetros como son la velocidad del avión y la densidad del aire. Para ello el ADC (ver post dedicado) entrega estos datos al FCC.
Este sistema es especial, porque es el encargado de amortiguar un efecto poco deseable denominado bataneo del holandés o Dutch Roll en inglés. Este amortiguamiento o supresión de tal efecto recibe la denominación inglesa de "Yaw Damper". En la imagen de la silueta se puede ver el famoso bataneo o Dutch roll. El objetivo es detener este movimiento por medio de los giróscopos intentando que el avión se situe permanentemente dentro del círculo rojo (cero bataneo). Para poder efectuar las correcciones pertinentes, el FCC en este caso necesita además del giróscopo una serie de parámetros como son la velocidad del avión y la densidad del aire. Para ello el ADC (ver post dedicado) entrega estos datos al FCC.


{kind=link}
Excelente y didáctico.
ResponderEliminar