Mandos y controles de vuelo
Los controles de vuelo han sufrido una evolución constante desde los primeros modelos, puramente mecánicos, hasta los mas recientes sistemas de vuelo analógico/digital y los conceptos By-Wire/By Light. Vamos a hacer un breve repaso de ellos empezando por la definición del concepto.
Los controles de vuelo comprenden las superficies de vuelo, los elementos de control en la cabina de vuelo, los elementos que unen a estos (cables, actuadores, etc.) y todos aquellos sistemas y subsistemas intermedios (ordenadores, sistema hidráulico, eléctrico, etc.) que son necesarios para que el avión consiga ser controlable, en cuanto a los cambios de dirección se refiere, en los tres ejes.
Los controles de vuelo mecánicos fueron los primeros diseños que lograron hacer cambiar de forma segura la dirección de vuelo de una aeronave. Estos controles se han venido en llamar convencionales. A través de elementos mecánicos como poleas, cables, palancas, etc. se transfieren los movimientos de las columnas de dirección a las superficies de vuelo.

También se consideran mandos de vuelo reversibles, porque a través de los elementos mecánicos el piloto recibe y siente las fuerzas aerodinámicas que originan las superficies de vuelo. En estos controles las fuerzas aerodinámicas pueden llegar a ser tan fuertes que el piloto no es capaz de contrarrestarlas. El vuelo resulta fatigoso por el gran esfuerzo que el piloto realiza durante todo el vuelo. La ruptura de un cable de transmisión significaba la incontrolabilidad de la superficie afectada.
Los sistemas de mandos de vuelo de la siguiente generación recibieron una ayuda de elementos mecánicos e hidráulicos. Un caso que requiere mención especial en el segmento de los reactores regionales es el del Avro 146, también conocido como RJ100. Este modelo se caracteriza por el diseño de sus mandos de vuelo completamente mecánicos (a excepción del timón de dirección, que es hidráulico).
La presión que ejerce el piloto sobre los controles es mínima debido al magnifico diseño de sus mandos de vuelo. En realidad el piloto no mueve las superficies propiamente dichas, por el contrario lo que se mueve es una pequeña pieza colocada al final de la superficie de control y conocida como “tab”.



Los controles de este tipo se encuentran perfectamente compensados en su posición neutral de forma que la mayor parte del peso de la superficie se encuentra adelantada con respecto al punto de giro. El sistema se encuentra en equilibrio y cualquier alteración del tab creara una situación de desequilibrio de fuerzas.
El resultado del desequilibrio de fuerzas dará lugar al movimiento de la superficie, todo ello de forma puramente mecánica con muy poca fuerza aplicada desde los mandos situados en la cabina de vuelo.

A pesar de la aparente simplicidad de estos sistemas mecánicos existen otras consideraciones que han hecho mas populares a los sistemas hidráulicos. En este tipo de mandos el piloto solo tiene que ejercer una ligera presión sobre los controles de vuelo y un sistema de tipo hidráulico que actúa en paralelo se encarga de ayudar al piloto con el resto del movimiento. Esto es algo parecido a la dirección asistida de los coches (power steering). Estos son sistemas que también se consideran reversibles y en los que un fallo del sistema hidráulico no impide que el piloto pueda mover las superficies de vuelo, eso si, con muchísima más fuerza. Cuando funcionan normalmente, con estos sistemas el esfuerzo del piloto al mover las superficies se reduce considerablemente. Se considera que la relación de fuerzas piloto/sistema de potencia de ayuda es de un 1 a 15 hasta un 1 a 30. Una de las formas de evitar fallos en este tipo de sistemas es la de incrementar la redundancia y emplear varios sistemas hidráulicos.
Una generación posterior de estos sistemas asistidos fue aquella en la que el piloto dejo de actuar directamente las superficies de vuelo. Se trata de sistemas operados puramente por energía hidráulica, totalmente aislados. Al no tener el piloto conexión directa con las superficies son considerados sistemas de vuelo irreversibles. Una gran desventaja de este tipo de sistemas es que el piloto no “siente” las superficies, no tiene retroalimentación de las fuerzas aerodinámicas generadas en las superficies de vuelo y por ello se puede crear un fallo estructural. Por este motivo se introdujo en estos sistemas un elemento llamado sensibilidad artificial, que es el encargado de generar unas fuerzas en las columnas de dirección para darle al piloto la sensación de que se tiene control directo sobre las superficies. El modo en que están calibrados estos sistemas tiene en cuenta la cantidad de deflexión de la superficie y el cuadrado de la velocidad de la aeronave. A diferencia de los modelos anteriores en estos sistemas la perdida de fluido hidráulico significaba la perdida de control de las superficies afectadas. No había posibilidad de control sin fuerza hidráulica, por ello la redundancia de sistemas es en este caso más importante que en el anterior. En estos modelos también se puso en practica el uso de turbinas de emergencia (RAT) u otro tipo de fuente de energía alternativa en caso de que los motores dejaran de operar (y con ellos el sistema hidráulico). En los aviones de altas prestaciones son estos los mandos de vuelo que se utilizaron antes del advenimiento de la filosofía “by-wire”.

La ultima clase de mandos de vuelo es la denominada Fly-By-Wire. Esta tecnología empezó a desarrollarse en los años 60 y se introdujo por primera vez en la aviación comercial en el Concorde, donde los slats ya empleaban esta técnica. El A320 tiene el honor de ser el primer avión comercial totalmente equipado con mandos de vuelo “Fly-By-Wire”. En este tipo de mandos de vuelo el piloto controla las superficies de control por medio de señales eléctricas.
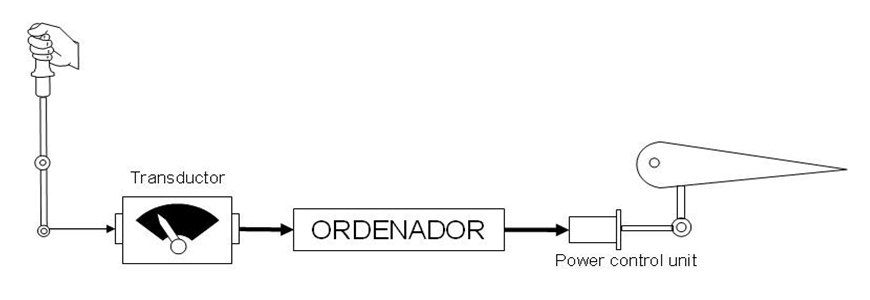
La fuerza hidráulica se encarga de mover las superficies al igual que en el caso anterior. No existen conexiones mecánicas, el movimiento de las columnas de dirección en la cabina de vuelo, genera unas señales que son transferidas a varios ordenadores por medio de cables eléctricos. Obviamente la redundancia de sistemas en este caso resulta fundamental. Un fallo del sistema eléctrico podría dejar sin control a la aeronave, es por ello que en muchos casos se opta por un subsistema de seguridad de emergencia puramente mecánico.
Este no es el caso del EMBRAER, aquí la redundancia de sistemas se basa en el empleo de múltiples canales y generadores de emergencia, tal como se verá más adelante. Estos sistemas también se han considerado como irreversibles, por lo que deben de contar con sistemas de sensibilidad artificial. En el futuro se trata de sustituir las señales eléctricas por luz que viaja por elementos de fibra óptica en vez de cables. Esta tecnología se empieza a llamar FBL (Fly-By-Light).
Las ventajas de usar controles de vuelo FBW son múltiples. Los elementos de control son menos pesados que los sistemas mecánicos (poleas, cables, cuadrantes, etc.). Al tratarse de buses de datos y conexiones eléctricas el mantenimiento también es mucho más sencillo y menos costoso. La respuesta de los ordenadores y las señales eléctricas son mucho más rápidas que los movimientos mecánicos, por lo que se incrementan el confort, la respuesta a las turbulencias, etc. En general se puede decir que estos mandos de vuelo son mas eficientes, mas fáciles de mantener y mas livianos que los controles de vuelo tradicionales. Todo ello hace que el coste de operación se vea reducido en gran medida. En el gráfico se puede ver que el resultado de todas estas características, lo que se traduce en una mayor economía de operación y un incremento del confort.

Ya sea por medio de luz o por medio de señales eléctricas el paradigma “Fly –By” es siempre el mismo, aunque dentro de este tipo de mandos de vuelo se pueden hacer mas subdivisiones.
Una de las subdivisiones mas importantes es la de considerar una arquitectura FBW Analógica o FBW Digital. También existen modelos que emplean una combinación de ambos (como en el EMBRAER). Es importante también el cambio de mentalidad en este tipo de configuraciones. Existe una gran controversia entre las dos filosofías imperantes en la actualidad.
Una de ellas es la que hace referencia al hecho de que las arquitecturas de este tipo las unidades de control deben de estar centralizadas. Así, por ejemplo, en modelos antiguos FBW existe una unidad central de proceso de señales u ordenador central, que se encarga de todos los cálculos posibles. Cuando la orden se ha calculado se manda a las superficies de control que la ejecutan sin mas procesamiento.
Hoy en día se habla de sistemas distribuidos (Digital Distributed Fly-By-Wire Flight Control Systems FBW-FCS) en contraposición a las arquitecturas centralizadas (Digital Centralized Fly-By-Wire Flight Control Systems). Debido a las presiones del mercado y a una necesidad de mejorar el sistema se ha procedido a la descentralización de los sistemas FBW.
En aviación está ocurriendo algo parecido a lo que hace años ocurrió con los PC domésticos, en los que se decidió descargar el cálculo de las unidades CPU (Central Processing Units) aumentando las capacidades de las GPU (Graphic Processing Units). De esta forma las tarjetas gráficas se hacían cargo de ciertos cálculos y asumían más autoridad en ciertas aplicaciones. De la misma forma se comienzan a utilizar en los aviones elementos de control y procesamiento que se encuentran distribuidos por diversas partes de la aeronave. Estos elementos se han denominado “Smart” (inteligentes), así, por ejemplo, en el EMBRAER 170-190 existen los SMART SERVO-ACTUATORS, elementos que integran cierta computación lógica que se produce in-situ.
Las ventajas de estos sistemas distribuidos son grandes, ya que las unidades centrales de cálculo en los aviones (MAU - Modular Avionic Units o FCC - Flight Control Computers), pueden emplear ahora más recursos en gestionar elementos de otra naturaleza, como el confort de los pasajeros, aumento de parámetros de control, seguridad y descarga de trabajo para los pilotos.
En general se puede decir que una arquitectura distribuida tiene múltiples procesadores distribuidos por todo el avión, a los que se les asigna misiones de cálculo y control en tiempo real, ejecutando comandos provenientes de un software en función de la fase de vuelo o situación. Alguna capacidad limitada de procesamiento también tiene lugar en los sensores o actuadores del sistema. Los sistemas centralizados, por el contrario, son aquellos que llevan a cabo cálculos computacionales dentro de unidades centrales de procesamiento en módulos reemplazables en línea (LRM).
Con esta configuración distribuida que equipa la familia E-Jet de EMBRAER se puede introducir un nuevo concepto llamado Control de Configuración de la Aeronave o “Control Configured Vehicle” (CCV). Con este concepto se logra que las superficies de control de vuelo y los múltiples procesadores mejoren la estabilidad, el confort, la seguridad etc. Para ello todos estos elementos de control “inteligente” necesitan cierta autonomía de operación y calculo. Ejemplos de elementos inteligentes serian el FADEC (http://en.wikipedia.org/wiki/FADEC), los SMART SENSORS, SMART SERVOS, etc.
Gracias a este concepto se obtienen las llamados funciones de alto nivel o HIGH LEVEL FUNCTIONS, de las que se hablará mas adelante en otro artículo. Existe una corriente teórica de pensamiento que indica que no es recomendable para el propio sistema volverse “muy inteligente”. Si esto ocurriera podría llegar el caso de que una parte del subsistema general intentara rebelarse contra el resto del sistema. A todos nos viene a la cabeza la magnifica película de Stanley Kubrick en la que el “inteligente” HAL 9000 pone en peligro la misión de la nave y mata a sus ocupantes en la famosísima “2001 una odisea del espacio”. La tendencia actual es pues, que se producirá una migración hacia los modelos de arquitectura distribuida. Se considera que no es malo que los elementos de control y cálculo sean autónomos y “smart”, pero solo lo justo para propio beneficio del sistema en general.
Otra de las grandes controversias de los sistemas FBW es la de los efectos de protección de los sistemas FBW, o en otras palabras ¿Quien tiene el control último de la aeronave? Existen dos conceptos o filosofías diferentes, la norteamericana liderada por BOEING utiliza diseños con un concepto llamado "envelope protection" (protección de la envolvente de vuelo), mientras que la otra filosofía es liderada por AIRBUS con su concepto llamado "envelope limiting"(limitación de la envolvente de vuelo). La diferencia es bastante clara, en el sistema envelope protection el piloto puede exceder los límites siempre que se considere oportuno, mientras que en el caso del envelope limiting el piloto no puede sobrepasar estos limites. De esta manera AIRBUS quiere eliminar de la envolvente del vuelo maniobras que son inseguras o potencialmente peligrosas.
En el EMBRAER 170-190 se ha empleado un diseño distinto al de AIRBUS, básicamente se ha seguido el concepto Norteamericano de Fly-By-Wire, que sin ser tan sofisticado permite más intervención del piloto. Repasando los diagramas del EMBRAER 170-190 y del BOEING 777 se pueden encontrar claras coincidencias en cuanto a su arquitectura aunque los nombres de los ordenadores que intervienen son distintos.


Hola! Muy interesante el artículo. Me interesa mucho aprender acerca de los sistemas de controles de vuelo por Fly By light, si tienen alguna informacion que pudieran suministrarme se los agradecería mucho. Un saludo!
ResponderEliminarHola Santiago, el Fly-by-light (volar por medio de luz ) es una tecnología relativamente nueva de control electromecánico optoelectrónico para aeronaves.
EliminarEn aviación comercial, en lugar de señales eléctricas a través de líneas de cobre, como es el caso de los controles fly-by-wire habituales, se utilizarán en el futuro señales luminosas a través de cables de fibra óptica para transmitir valores medidos y comandos de control. En algunos aviones militares como el Northrop B-2 ya se utiliza esta tecnología.
Las señales eléctricas convencionales se seguirán usando dentro de sensores, actuadores y computadoras. Sin embargo, los datos se transportarán por medio de fibras ópticas. Las ventajas son el peso reducido del cable y la nula sensibilidad a las interferencias electromagnéticas, por ejemplo, los ataques EMP (pulso electromagnético), ondas de radio, teléfonos móviles, etc. La desventaja es el peso adicional del convertidor óptico/eléctrico. Ese fue uno de los motivos por los que Airbus consideró que no era adecuado en el A380.Sin embargo, el fly-by-light se está imponiendo en los aviones militares (Northrop B-2 , Kawasaki P-1) porque es inmune a las interferencias. En la industria de la aviación comercial, el vuelo por luz será sin duda el estándar dentro de poco.
Desarrollo
Como casi siempre, los norteamericanos lideran esta tecnología. Ya en 1990, la NASA y el fabricante de aviones estadounidense McDonnell Douglas Corp. firmaron un acuerdo para apoyar la introducción y certificación de sistemas fly-by-light fabricados en EE. UU. en aviones de carga. Sin embargo, las áreas de aplicación de esta tecnología no solo se contemplaron en la construcción de aeronaves, sino también en otras áreas de la economía estadounidense. Además de McDonnell Douglas, otras organizaciones han realizado contribuciones tecnológicas, como el Centro de investigación y sistemas de Honeywell y el Grupo de sistemas espaciales, Aplicaciones electromagnéticas (EMA) y la Universidad Johns Hopkins.
El 30 de marzo de 1993 se emitió una patente estadounidense que permitía al piloto corregir el control del piloto automático a través de un sistema fly-by-light. En 1995/1996, McDonnell Douglas introdujo el programa de desarrollo de hardware de sistema avanzado Fly-By-Light (FLASH) para desarrollar un sistema de control de vuelo fly-by-light para aviones militares y comerciales (uso dual). Se demostró con éxito un sistema de control de vuelo primario para la actitud de vuelo y un sistema de trimado.
Un dirigible moderno y un helicóptero experimental
El primer vuelo de la aeronave Sentinel 1000 con un sistema de control fly-by-light se produjo el 26 de junio de 1991. Desde 2002, se opera un helicóptero de investigación y prueba en el Centro de Investigación Aeroespacial DLR en Braunschweig, en el que se eliminó el control mecánico y se reemplazó por un control eléctrico/óptico con plena autoridad. Este helicóptero está basado en el modelo 135 de Eurocopter. En estos aparatos se constataron las tres ventajas principales de la transmisión de señales ópticas digitales: alta inmunidad a las interferencias electromagnéticas, transmisión segura de grandes cantidades de datos y menor peso en comparación con los controladores y buses d edatos convencionales.
ATTAS
El Sistema de aeronaves de prueba de tecnologías avanzadas (ATTAS) se utilizó en DLR desde 1985 hasta 2012. Este avión de investigación se basa en el avión comercial VFW 614 , un avión comercial de corta distancia con capacidad para 44 pasajeros. El ATTAS estaba equipado con un equipo de prueba de vuelo que incluía un sistema de control de vuelo electrohidráulico dúplex (fly-by-wire/fly-by-light).
En septiembre de 2007, el Kawasaki XP-1, un avión de reconocimiento, realizó su vuelo inaugural. El XP-1 es el primer avión operacional del mundo que está equipado con un control de vuelo por luz. Además, Japón está probando el avión de combate ATD-X como demostrador de tecnología con fly-by-light; el primer vuelo tuvo lugar en 2014. Otros países, como la India, también están interesados en utilizar este sistema con fines militares. India tiene su propio avión de combate, el Advanced Multirole Combat Aircraft (AMCA), en desarrollo. Se exhibió un modelo en Aero India en Bangalore en 2013. El AMCA estará equipado con esta nueva tecnología de control por luz.
EliminarEn 2008, el fly-by-light se probó con éxito en un jet privado de Gulfstream Aerospace durante un vuelo de 75 minutos. En diciembre de 2014, se publicó un Informe de información aeroespacial, que apunta a la tecnología fly-by-light para controlar los actuadores de vuelo operados hidráulicamente. Este informe presenta y analiza enfoques centrados en la normativa aeronáutica.