Fundamentos físicos del combate aéreo: la base energética, aerodinámica y táctica del enfrentamiento aire-aire
Fundamentos físicos del combate aéreo
La base energética, aerodinámica y táctica del enfrentamiento aire-aire

La historia del combate aéreo demuestra una constante: la superioridad no la concede un único parámetro, sino la comprensión profunda de cómo energía, aerodinámica y táctica interactúan en un sistema dinámico altamente no lineal. Tal como subraya Robert L. Shaw en El Combate Aéreo – Tácticas y Maniobras, el dogfight no es una sucesión de maniobras espectaculares, sino una gestión continua de energía y geometría bajo restricciones humanas, estructurales y aerodinámicas.
La maniobrabilidad de un caza moderno no puede evaluarse desde la intuición ni desde cifras aisladas. Conceptos aparentemente simples como “gira más” o “acelera mejor” esconden realidades físicas complejas. Este texto desarrolla los fundamentos físicos del combate aéreo desde una perspectiva técnica, alineada con la doctrina energética de Shaw, conectando aerodinámica clásica, control de vuelo moderno y aplicación táctica real.
Los ejes de movimiento y el control tridimensional
Toda aeronave se mueve en torno a tres ejes ortogonales que definen su actitud en el espacio:
Eje longitudinal (Roll / Alabeo)
Eje transversal (Pitch / Cabeceo)
Eje vertical (Yaw / Guiñada)
En aeronaves ligeras convencionales, cada eje está asociado a una superficie de control principal (alerones, estabilizadores horizontales y timón de dirección). En cazas modernos, sin embargo, esta correspondencia es difusa: múltiples superficies contribuyen simultáneamente al control de un mismo eje, coordinadas por sistemas fly-by-wire que priorizan estabilidad artificial, eficiencia energética y límites estructurales.
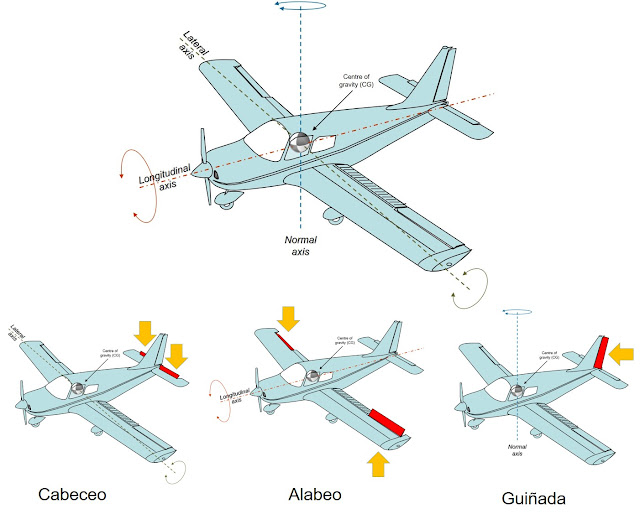
En una Piper Arrow como la de la imagen es muy sencillo diferenciar ejes y superficies de control involucradas.
Diferencias fundamentales entre cazas y aeronaves convencionales
En un avión civil, la estabilidad estática positiva asegura que cualquier perturbación tienda a corregirse de forma natural. En un caza moderno ocurre exactamente lo contrario: la inestabilidad longitudinal deliberada reduce el momento estabilizador, permitiendo mayores tasas de rotación en pitch y menores penalizaciones energéticas.
Configuración de cola convencional (F-22): estabilidad negativa gestionada electrónicamente, combinada con empuje vectorial 2D.
Canard-delta (Eurofighter Typhoon): fuerte acoplamiento aerodinámico entre canards y ala principal, optimizando el control a alto ángulo de ataque.
Delta pura (Mirage 2000): estabilidad clásica con CG fijo, excelente rendimiento a alta velocidad pero penalización energética a bajo régimen.
Estas configuraciones condicionan directamente la envolvente de maniobra y el tipo de tácticas óptimas.

En la imagen se observa el cabeceo en los aviones de combate. Este viene dado por la configuración de sus superficies y la localización de su centro de gravedad o centro de giro. Tanto el F-22 como el Eurofighter son inestables y manejan el cálculo del centro de gravedad en sus ordenadores. El Mirage 2000 es un avión convencional con un C.G. fijo. Se muestra el eje de cabeceo y las superficies y fuerzas involucradas.
Cabeceo: control del vector de sustentación
- Incrementar carga g
- Reducir radio de giro
- Controlar el ángulo de ataque
- Forzar overshoots del adversario

Un movimiento de cabeceo en un avión de combate no es simplemente un movimiento ascendente o descendente del morro de la aeronave en relación con la dirección de vuelo. En aeronaves civiles, el movimiento de cabeceo suele iniciarse con los estabilizadores horizontales; sin embargo, en los cazas, dependiendo de la configuración exacta de la aeronave, puede iniciarse con estabilizadores horizontales, flaps, canards, cola en V o sistema de vectorización de empuje del motor. Es importante destacar que el movimiento de cabeceo a menudo provoca que la aeronave gire debido al cambio en la dirección del vector de sustentación. Sin embargo, los cazas suelen cabecear mucho más rápido que girar, especialmente a bajas velocidades.
Alabeo: generación de giro
El alabeo orienta el vector de sustentación fuera del plano vertical, habilitando el viraje. Su eficacia depende de:
Momento de inercia alrededor del eje longitudinal
Distribución de masas
Autoridad de superficies
Contrario a la intuición popular, una mayor masa centralizada favorece altas tasas de alabeo, razón por la cual cazas monomotor compactos suelen destacar en este aspecto. Sin embargo, el alabeo por sí solo no cambia el rumbo: requiere cabeceo coordinado para cerrar el viraje.

Un alabeo se produce cuando una aeronave gira sobre sí misma con el fuselaje como eje central (eje longitudinal de la aeronave). Para ello, las aeronaves utilizan alerones (o flaperones) en el borde trasero exterior de cada ala. Ambos alerones se mueven en direcciones opuestas, arriba y abajo, disminuyendo la sustentación en un ala y aumentándola en la otra, lo que permite que la aeronave comience a alabear. Algunos aviones de combate también pueden emplear una deflexión asimétrica de los planos de cola horizontales combinada con otras superficies. La combinación de alabeo y cabeceo ayuda a la aeronave a cambiar su dirección de desplazamiento (viraje). En general, cuanto mayor sea la masa concentrada en el centro de la aeronave, mayor será su velocidad de alabeo; por lo tanto, los cazas monomotor suelen alabear más rápido que los cazas multimotor.
Guiñada: eje secundario pero tácticamente decisivo
La guiñada tiene menor influencia directa en el cambio de rumbo, pero es crucial en:
Control direccional a alto AoA
Maniobras post-pérdida
Alineación de sensores y armas
En aeronaves con empuje vectorial 3D, la guiñada puede iniciarse sin flujo aerodinámico efectivo, rompiendo las limitaciones clásicas del control.
 La guiñada es el movimiento del morro de la aeronave perpendicular a las alas (izquierda o derecha). El timón de dirección es el principal control de vuelo que controla la guiñada, pero en algunas aeronaves con sistema de control vectorial de empuje 3D, el TVC puede iniciar el movimiento de guiñada. En algunas maniobras específicas posteriores a la pérdida, como la caída de una hoja, los flaperones también pueden iniciar el movimiento de guiñada. El movimiento de guiñada también puede causar cambios de rumbo, pero no tanto como el movimiento de cabeceo.
La guiñada es el movimiento del morro de la aeronave perpendicular a las alas (izquierda o derecha). El timón de dirección es el principal control de vuelo que controla la guiñada, pero en algunas aeronaves con sistema de control vectorial de empuje 3D, el TVC puede iniciar el movimiento de guiñada. En algunas maniobras específicas posteriores a la pérdida, como la caída de una hoja, los flaperones también pueden iniciar el movimiento de guiñada. El movimiento de guiñada también puede causar cambios de rumbo, pero no tanto como el movimiento de cabeceo.
El viraje: geometría, energía y carga g
Un viraje es el resultado de inclinar el vector de sustentación y aumentar su magnitud. Físicamente, la sustentación debe cumplir dos funciones simultáneas:
Su componente vertical equilibra el peso
Su componente horizontal actúa como fuerza centrípeta
De aquí surge el factor de carga (n):
n = 1 / cos(φ)
Donde φ es el ángulo de alabeo.

- Sustentación (L): En un giro, la sustentación debe aumentar para que su componente vertical siga equilibrando al peso, mientras que la componente horizontal proporciona la fuerza centrípeta necesaria para girar.
- Factor de carga (g): Es la relación entre la sustentación y el peso. A mayor inclinación, más "pesado" se siente el piloto (fuerza G).
- Viraje instantáneo (ITR): Es la velocidad de viraje máxima que una aeronave puede alcanzar en una condición dada (velocidad/altitud/peso). Su límite depende de la sustentación máxima que la aeronave pueda generar; en resumen, cuanto mayor sea su CLmax, mayor será su velocidad de viraje instantánea. Es importante recordar que, al realizar un viraje instantáneo, la aeronave pierde continuamente energía en forma de altitud o velocidad.
- Limitado por CLmax y AoA
- Máxima tasa momentánea
- Alto consumo energético
- Viraje sostenido (STR): Es la velocidad de viraje máxima que una aeronave puede alcanzar sin perder energía en forma de velocidad o altitud; en otras palabras, se puede mantener un viraje sostenido hasta que la aeronave se quede sin combustible o el piloto pierda el conocimiento. El rendimiento de una velocidad de viraje sostenida depende no solo de la sustentación que la aeronave puede generar, sino también de la resistencia que genera. Esto se debe a que el empuje del motor debe ser capaz de contrarrestar la resistencia generada en un viraje para que la aeronave no pierda velocidad. Por lo tanto, mientras que el viraje instantáneo suele ejecutarse con el ángulo de ataque máximo (CLmax), un viraje sostenido suele utilizar un ángulo de ataque muy moderado para no generar demasiada resistencia.
- Limitado por empuje disponible y resistencia
- Mantiene energía
- Determina superioridad prolongada

- A 0° (Vuelo nivelado): cos (0°) = 1, por lo tanto n = 1g. Sentimos nuestro peso normal.
- A 45° de inclinación: cos (45°) ≈ 0.707, lo que resulta en n ≈ 1.41g.
- A 60° de inclinación: cos (60°) = 0.5, por lo tanto n = 2g. ¡Pesamos el doble!
- A 75° de inclinación: (como en la imagen), cos (75°) ≈ 0.25, lo que resulta en casi 4g.
- A 80° de inclinación: Las fuerzas suben a casi 6g.

En este punto, un piloto humano probablemente perdería el conocimiento (G-LOC), ya que el límite típico antes del desmayo está entre 7g y 9g (incluso con traje anti-G).


Esto significa que, en teoría, necesitarías sustentación infinita para no perder altitud, porque a 90° ninguna parte de la fuerza de las alas apunta hacia arriba para combatir la gravedad. En la práctica, los pilotos que hacen giros de 90° aceptan que el avión "caerá" un poco o usan la potencia (empuje) del motor para compensar.
Parámetros malinterpretados
Al comparar las capacidades de los cazas, se utilizan con frecuencia ciertos parámetros populares. Sin embargo, a pesar de su popularidad, a menudo se malinterpretan. En esta sección, presentaremos estos parámetros y por qué se malinterpretan:
Carga alar
Una carga alar baja facilita altos factores de carga, pero no garantiza superioridad en giro. El perfil alar, la flecha y la curva CL/AoA son igual o más determinantes.
Relación empuje/peso (T/W)
El T/W estático es irrelevante fuera del banco de pruebas. En combate importan:
Empuje instalado
Régimen de vuelo
Resistencia inducida y parasitaria
Un avión con menor T/W puede acelerar mejor si su resistencia es inferior.
Velocidad máxima
La velocidad máxima absoluta rara vez es tácticamente relevante. Lo crítico es dónde dentro de la envolvente puede mantenerse esa velocidad, con qué carga y bajo qué restricciones estructurales.

En general, una carga alar menor significa que la aeronave debe generar menos sustentación para cualquier fuerza G que el piloto desee obtener (o, en otras palabras, una carga alar menor significa que se puede obtener más fuerza G en las mismas condiciones).
Por ello, un error común al comparar dos tipos de aeronaves es creer que la aeronave con menor carga alar automáticamente girará mejor. Sin embargo, esto no es correcto, ya que incluso con el mismo ángulo de ataque, diferentes tipos de ala pueden generar diferente cantidad de sustentación por unidad de área alar. Por ejemplo, el ala recta y gruesa del A-10 puede generar más sustentación que el ala delta del Mirage 2000. En términos generales, en cualquier ángulo de ataque particular antes del punto de pérdida, el ala con un ángulo de flecha más bajo podrá generar más sustentación por unidad de área (curva de coeficiente de sustentación/ángulo de ataque más pronunciada).

Como se puede observar en la ecuación de sustentación, el coeficiente de sustentación es un parámetro importante para calcular la sustentación total que se puede generar.

También es importante recordar que las alas con un ángulo de flecha menor tendrán mayor resistencia transónica y menor número de Mach crítico.

Relación empuje/peso (T/W):

G sostenida y T/W
La relación empuje/peso (relación T/W) de una aeronave se puede definir simplemente como la relación del empuje que el motor puede producir dividida entre el peso total de la aeronave. En resumen, cuanto mayor sea la relación empuje/peso, mejor podrá el caza acelerar y mantener su viraje. El problema con este parámetro es que es muy simple y pasa por alto varios factores.
Para empezar, el valor de empuje que se utiliza a menudo en el cálculo de empuje/peso es el empuje estático sin instalar a nivel del mar del motor a reacción; en otras palabras, se trata del empuje que el motor puede producir cuando está en una posición estacionaria en tierra en un banco de pruebas. Sin embargo, en realidad, el empuje que cualquier motor a reacción puede producir se ve significativamente afectado por la cantidad de aire a la que tiene acceso; por lo tanto, el valor de empuje se ve afectado por la altitud y la velocidad de la aeronave (y la capacidad de la entrada para recuperar la presión).
Otra suposición común al comparar la relación empuje/peso de diferentes cazas es compararlos con el mismo porcentaje de combustible, como 50% o 100%. El problema obvio con este método es que los diferentes tipos de cazas están optimizados para diferentes radios de misión, por lo que transportan diferentes cantidades de combustible. Por ejemplo, una comparación rápida con 50% de combustible y dos misiles nos dirá que el F-16 y el MiG-29 tienen una mejor relación empuje/peso que el F-35 y el Su-27. Sin embargo, al observar con más cuidado, podemos darnos cuenta que, internamente, el MiG-29 solo transporta 3500 kg de combustible, el F-16 sin CFT solo 3200 kg, mientras que el Su-27 puede transportar 9400 kg y el F-35A 8278 kg. Esto significa que una comparación con el mismo porcentaje de combustible no sería adecuada ni correcta para el caza con mayor radio de combate.
Por último, aunque una mayor relación empuje/peso conlleva una mayor tasa de aceleración, es fundamental recordar que otro factor importante es la resistencia. Esto se debe a que:
Aceleración = Fuerza/Masa
Sin embargo, la fuerza que debe considerarse aquí es:
Fuerza resultante = Empuje del motor – Fuerza de resistencia
Por lo tanto, una aeronave con menor T/W puede tener una mayor tasa de aceleración, siempre que tenga menor resistencia. La fuerza de resistencia se ve afectada tanto por la forma aerodinámica como por el tamaño de la aeronave.


Este es posiblemente el parámetro más fácil de entender para un profano en la materia, ya que la velocidad se refiere básicamente a la velocidad a la que se mueve la aeronave y, en el caso de los cazas a reacción, suele medirse en número de Mach. Una mayor velocidad permite a un caza alcanzar al enemigo o dejarlo atrás, y también significa que se puede aumentar el alcance cinemático de los misiles aire-aire y aire-tierra. Por lo tanto, lógicamente, todos los diseñadores querrán que sus cazas sean lo más rápidos posible. ¿Parece obvio? Pero aquí hay más de lo que parece a primera vista.
Para empezar, veamos qué determina la velocidad máxima de una aeronave: una aeronave alcanza la velocidad máxima cuando el empuje máximo que puede generar es igual a la resistencia que genera al moverse; en otras palabras, cuando la fuerza resultante es igual a cero, la aeronave ya no puede acelerar.
El sentido común sugiere que un caza con un motor más potente y una menor resistencia siempre será más rápido. Desafortunadamente, la realidad no es tan simple. Como se mencionó anteriormente, el empuje del motor a reacción no es un valor constante sino más bien un valor variable que se ve afectado por la altitud/velocidad de la aeronave. Para los motores turborreactores y turbofán utilizados en todos los cazas hoy en día, el aire debe reducirse a velocidad subsónica antes de que entre en el motor.
La pregunta obvia que surge es "pero casi todos los cazas ahora pueden volar más rápido que el sonido, entonces, ¿cómo es que el aire puede entrar en el motor a velocidad subsónica?", y ahí es donde entra en juego el diseño de la entrada. Si bien los aviones comerciales a menudo llevan el motor en una góndola corta expuesta, todos los aviones de combate supersónicos utilizan un sistema de entrada cuidadosamente diseñado para sus motores, estas entradas pueden crear ondas de choque para ralentizar el flujo de aire antes de que entre en el motor (esto también se conoce como recuperación de presión). Cuanta más onda de choque pueda crear el motor, mejor podrá ralentizar el flujo de aire a alta velocidad (recuperar presión). En otras palabras, los cazas de alta velocidad necesitan un sistema de admisión que pueda generar múltiples ondas de choque.

Variación de la Recuperación de la Presión Total con el Número de Mach de Vuelo para Diferentes Números de Mach.
Las entradas se pueden dividir en tres tipos principales:

 |
| Los motores convencionales son subsónicos y no pueden ingerir aire a velocidad supersónica. Los difusores de entrada con geometría variable se encargan de decelarar el aire hasta un régimen en el que puedan operar los motores. |
 |
| Los famoso "Souris" (ratones) que equipan a la familia Mirage. Estos dispositivos se movían manualmente en los primeros prototipos. El piloto avanzaba la posición de los souris cuando el avión aceleraba para poder evitar reducir las turbulencias en la entrada. Gracias a este sistema el primer Mirage III alcanzó el Mach 1.8 en 1957. |
 |
| detalle de los souris de la familia Mirage. Posición retrasada en vuelo lento y posición adelantada en vuelo supersónico. |


Por ejemplo: la velocidad máxima del MiG-25 es Mach 2,83, la del F-16 es Mach 2; en resumen, la velocidad máxima absoluta del MiG-25 es un 41 % mayor que la del F-16. El sentido común de un profano sugeriría que el MiG-25 siempre es más rápido que el F-16, independientemente de la altitud, debido a la enorme diferencia en velocidad máxima. Pero al analizar sus respectivas envolventes de vuelo, vemos que esta conclusión precipitada no puede estar más lejos de la realidad.
- A nivel del mar, el MiG-25 tiene dificultades para superar Mach 0,85, mientras que el F-16 alcanza una velocidad máxima de Mach 1,2.
- A una altitud de 5 km (equivalente a 16.400 pies), el MiG-25 solo alcanza Mach 1,1, mientras que el F-16 alcanza una velocidad máxima de Mach 1,55.
- A una altitud de 10 km (equivalente a 32.808 pies), el MiG-25 solo alcanza Mach 1,6, mientras que el F-16 alcanza una velocidad máxima de Mach 1,95.
- A una altitud de 15 km (equivalente a 49.212 pies), el MiG-25 alcanza una velocidad máxima de Mach 2,3, mientras que el F-16 se limita a Mach 2.
- A una altitud de 20 km (equivalente a 65.616 pies), el MiG-25 alcanza una velocidad máxima de Mach 2,83, mientras que el F-16 Ni siquiera se puede mantener un vuelo nivelado a esta altitud.





.png)



De igual manera, el F-15 también tiene un límite de placa significativo con el tanque de combustible conformado. Específicamente, el F-15E tiene una velocidad máxima de Mach 2,5, pero cuando está equipado con AIM-7 en la estación CFT, el piloto no puede superar Mach 1,4 o 660 KCAS (1220 km/h de velocidad aerodinámica calibrada), lo que sea menor. Resulta irónico que, a pesar de que tanto el F-15E como el Su-27 cuentan con una entrada de aire variable que les permite alcanzar velocidades de Mach 2,3-2,5, en combate, al transportar 6 misiles aire-aire (el Su-27) o con CFT (el F-15E), su velocidad máxima es menor que la del F-16 con 6 AIM-120. Esto se debe a que el F-16 no tiene límite de velocidad de placa cuando lleva 6 AIM-120.

Nota: Sin CFT, los AIM-7 y AIM-120 se transportarán en posición semiempotrada (a la derecha de las fotos a continuación); en esa configuración, no hay límite de velocidad de placa. Sin embargo, cuando se equipan CFT, los AIM-7 y AIM-120 se transportarán en las estaciones CFT salientes (a la izquierda de las fotos a continuación), en cuyo caso sí hay límite de velocidad de placa, como se mencionó anteriormente. F-15 con AIM-7


- La Cobra de Pugachev: El avión eleva el morro hasta quedar vertical (o incluso más allá de los 90°) mientras sigue desplazándose hacia adelante. Actúa como un freno de aire masivo para que un perseguidor lo sobrepase.

- Cuchillo (Falling Leaf): Es una oscilación controlada de guiñada (yaw) y alabeo (roll) a ángulos de ataque muy altos. Se ve como si el avión "flotara" cayendo de lado a lado.
- Herbst Maneuver (J-Turn): Un giro de 180° casi instantáneo utilizando un ángulo de ataque altísimo, permitiendo al piloto apuntar sus armas en la dirección opuesta en segundos.

- Empuje Vectorial (Thrust Vectoring): Las boquillas del motor se mueven físicamente para dirigir el chorro de escape. Si el motor apunta hacia abajo, el morro sube, sin importar si hay aire pasando por las alas o no.
- Sistemas Fly-By-Wire: Una computadora de vuelo corrige miles de veces por segundo para que el avión no entre en una barrena (spin) incontrolable.
- Canards: Esas pequeñas aletas delanteras que ayudan a controlar el flujo de aire turbulento sobre las alas principales.
- 2D (Bidimensional): Las toberas solo se mueven hacia arriba y hacia abajo. Esto ayuda drásticamente al Pitch (cabeceo). El F-22 Raptor usa este sistema.
- 3D (Tridimensional): Las toberas pueden moverse en cualquier dirección (arriba, abajo, izquierda, derecha y ángulos intermedios). Esto permite controlar el Pitch y el Yaw simultáneamente. Aviones como el Su-35 o el Su-57 son maestros en esto.
- Sin Empuje Vectorial: Las alas y el timón no tienen aire pasando sobre ellos. El avión es, literalmente, una piedra cayendo; el piloto no tiene control hasta que recupere velocidad.
- Con Empuje Vectorial: Como el control viene del motor y no del aire exterior, el piloto puede mover el morro del avión a voluntad aunque esté casi detenido en el aire. Es como si el motor "empujara" la cola hacia los lados para reorientar la nave.
- Radio de giro cero: El avión puede pivotar sobre su propio centro de gravedad.
- Recuperación instantánea: Si el avión entra en una barrena plana (un giro descontrolado que suele ser fatal), el empuje vectorial puede forzar el morro hacia abajo para recuperar el flujo de aire en segundos.
- Sigilo (Stealth): Al usar el motor para girar, el piloto puede usar menos los alerones y timones, cuya deflexión a veces aumenta la firma de radar del avión.
El combate aéreo es, en esencia, un problema de física aplicada bajo estrés humano. Tal como enseña Robert L. Shaw, el piloto que comprende la energía, respeta sus límites y manipula la geometría con intención táctica siempre tendrá ventaja sobre quien solo confía en prestaciones brutas.
En el cielo no gana el avión que “mejor maniobra”, sino el piloto que decide mejor cuándo y por qué maniobrar.



muy util
ResponderEliminar