Breve historia de las radioayudas a la navegación aérea

Los precursores
Los experimentos de
Hertz provocaron un gran interés en la investigación de radio que finalmente
produjo telegrafía inalámbrica, radio y televisión. Por su importancia, en 1930, la nueva unidad de
frecuencia fue nombrada "Hertz" en honor a su descubridor. La
expresión "onda electromagnética" se suele utilizar en los ámbitos
académicos y describe mejor el carácter físico de las ondas de radio. Sin
embargo, la expresión "onda de radio" se usa con más frecuencia en la
aviación y es por ello que aquí se utilizará indistintamente.

El español que
inventó la radio

Julio Cervera Baviera trabajó con Marconi en Londres y a su
regreso a España desarrolló los principios de la radiotelefonía. El autor
afirma que fue el comandante Cervera, junto con su ayudante George Kemp, los
que en 1899 resolvieron las dificultades de la telefonía sin hilos. Cervera obtuvo
sus primeras patentes antes de que terminara ese año. Julio Cervera constituyó
el 22 de marzo de 1902 la Sociedad Anónima Española de Telegrafía y Telefonía
sin Hilos ante el notario de Madrid Antonio Turón y Boscá.
Angel Faus subraya asimismo que Cervera aportó a la sociedad
sus patentes para la radiotelefonía sin hilos obtenidas a su nombre en España,
Bélgica, Alemania e Inglaterra. Al respecto, explica que “las inglesas son
significativas ya que se consiguieron sin oposición de Marconi y su entorno
empresarial, lo que indica que se trata de un sistema distinto”, y sostiene que
esto le convierte en “pionero indiscutible de la radiotelegrafía en España y la
radiotelefonía en el mundo entero´´. Las patentes de Cervera son cuatro años
anteriores a los primeros diseños del audión de Lee de Forest y también al
funcionamiento del robot teledirigido de Leonardo Torres Quevedo en París. En
agosto de 1899 Cervera presentó, además, la patente del telemando de equipos y
sistemas, el mando a distancia tan común en aplicaciones civiles y militares.
La radio llega a los aviones
En abril de 1915, el capitán J.M. Furnival fue la primera persona en escuchar una voz desde tierra cuando el mayor Prince dijo: «Si pueden oírme ahora, será la primera vez que se comunique una voz a un avión en vuelo». En junio de 1915, la primera transmisión de voz aire-tierra del mundo tuvo lugar en Brooklands (Inglaterra) a lo largo de unas 20 millas (la transmisión tierra-aire se realizó inicialmente mediante Morse, pero se cree que para julio de 1915 se lograron las comunicaciones de voz bidireccionales). A principios de 1916, la Compañía Marconi (Inglaterra) comenzó la producción de transmisores/receptores de radio aire-tierra que se utilizaron en la guerra de Francia.
Aplicaciones de las ondas de radio a la navegación
Al principio el vuelo fue visual con reconocimiento del
terreno, (carreteras, postes de teléfono, edificios, vías férreas, etc.). Esto
es lo que se conoce como navegación observada. Muchos pilotos solían usar mapas
de carreteras para la navegación. Lógicamente solo se podía volar en días con
buen tiempo y por las noches siguiendo las técnicas de navegación astral
introducidas por la marina. En las inmediaciones de los aeródromos solo se
podía utilizar señalización de tipo visual. Un paso más allá de la navegación
observada fue la navegación a la estima. En este tipo de navegación, el piloto
determina la posición de la aeronave en relación con la dirección, distancia y
tiempo transcurrido desde el paso sobre una posición conocida hasta la posición
actual. Los dos únicos instrumentos para ello eran la brújula y el cronómetro.
En la década de 1910 se utilizan hogueras y faros para poder
aterrizar por las noches. La implicación del estamento militar durante la gran
Guerra dio lugar a muchos avances en el campo de la aeronáutica y de la
navegación en general. De esta manera comenzó el servicio postal aéreo de los
Estados Unidos (15 de mayo de 1918, volado por pilotos del Ejército). En 1919,
Alcock y Brown cruzan por primera vez el Atlántico sin escalas a los mandos de
un bimotor Vickers Vimi (Ilustración inferior).




Estos podían informar del tiempo meteorológico y confirmar la posición. Con el tiempo otros aviadores fueron aportando datos interesantes y la información se recopiló en un libro con tablas y esquemas. Todo el mundo vio rápidamente los beneficios de usar estas tablas y el joven piloto empezó a vender copias por 10 dólares. Este hombre se llamaba Elrey Borge Jeppesen y en 1934 fundó la compañía que lleva su nombre.


Aparecen los radiofaros (radio ranges o RNG) para indicar puntos
fijos que definen rutas. En 1929 se lleva a cabo el primer vuelo real y completamente instrumental
de la historia (en 1927 se habían efectuado otros vuelos parcialmente instrumentales). El osado aviador que voló a ciegas su Consolidated NY-2 Husky
totalmente capotado era ni más ni menos que Jimmy Doolittle. Este pionero
sirvió como oficial de las Fuerzas Aéreas del
Ejército de los Estados Unidos durante la Segunda Guerra Mundial. Obtuvo la Medalla
de Honor por su valentía y liderazgo como comandante de la famosa
Incursión Doolittle que dio lugar a la
famosa película 30 segundos sobre Tokio.
Debajo se puede ver al aviador y su cockpit con la capota replegada.



En aquel entonces se utilizaron estas antenas para definir
las vías aéreas utilizadas por las aeronaves en vuelo instrumental. El LFR se
mantuvo como la principal tecnología de navegación aérea hasta que fue
reemplazado por el sistema VOR en las décadas de 1950 y 1960.
En 1935 aparece la radiotelefonía en dos direcciones usando la HF y la UHF. En la misma década de los 30 aparecen los radiofaros, como el VOR y el NDB y la radionavegación se empieza a desarrollar mucho más deprisa con la invención del RADAR (1938) y la aplicación de sistemas basados en ondas de radio. De esta forma surgen los famosos sistemas de navegación hiperbólicos, tales como el LORAN y el OMEGA.
- OMEGA: Fue realmente el primer sistema de radionavegación global para la aviación, desarrollado por los Estados Unidos en cooperación con otras seis naciones amigas. una cobertura global utilizando solo 10KW de potencia irradiada. Había nueve estaciones Omega en total.
- LORAN : Es un sistema de ayuda a la navegación electrónico hiperbólico que utiliza el intervalo transcurrido entre la recepción de señales de radio transmitidas desde tres o más transmisores para determinar la posición del receptor. La versión más moderna es LORAN-C que funciona en frecuencias del espectro electromagnético entre 90 y 100 Khz . El uso de LORAN ha desaparecido casi por completo debido al GPS.
El radar merece una mención aparte en otro artículo. Por ahora basta decir que el invento del radar no se puede atribuir a un país o persona en concreto, sino que fue el resultado de diversas investigaciones y descubrimientos que dieron lugar a este sistema. Aquí se puede ver un anuncio del radio compas Kolster (1930).
El salto tecnológico
de la IIGM
En las décadas de los 40 aparece el ILS de forma
generalizada. En 1929 se hace la demostración del primer sistema de aterrizaje
por instrumentos, pero es en 1946 cuando la OACI provisionalmente selecciona el
ILS como radio ayuda para los aterrizajes en los aeropuertos internacionales
(“Trunk airports”). Hoy en día el ILS tiene tres categorías definidas de
acuerdo a la altura mínima de decisión y a la distancia visual: CAT I, CAT II y
CAT III. Aparecen el radar altímetro y el radio altímetro, el DME y el radar
meteorológico. Para larga distancia aparecen los sistemas SOL, que son los
precursores del famoso CONSOL (Sonne en alemán). También durante la
II GM se desarrolló el LORAN y otros sistemas de navegación
hiperbólica, como el famoso DECCA. El sistema DECCA utilizaba la
comparación de fase de bajas frecuencias (70 a 129 kHz) para calcular la
posición, a diferencia de los sistemas basados en intervalos de tiempo de
impulsos como el Gee (creado por los británicos para la RAF) o el
LORAN.
El RADAR se introduce en la aviación civil a partir de 1945. A partir de 1947 (creación de la ICAO) se posibilita el desarrollo homogéneo del sistema de navegación aérea. En la ilustración inferior se ve el cockpit de un B-36 con los instrumentos de la época.

Los años de posguerra
En los años 50, se establece el uso de los VOR para la
creación de la estructura de aerovías. Las famosas “Victor Airways”, que
todavía se usan hoy en día. Los VOR se idearon para sustituir a los
radiofaros y poder navegar con mayor precisión.
 Arriba: Avenal VOR en
una carta sectorial USA. Doppler VOR (debajo).
Arriba: Avenal VOR en
una carta sectorial USA. Doppler VOR (debajo).A finales de los 50 se desarrolla el primer sistema de navegación por satélite. Es el famoso TRANSIT precursor de los sistemas de posicionamiento global. El desarrollo comenzó en 1958. Se lanzó un prototipo de satélite, Transit 1A, en septiembre de 1959. Un segundo satélite, Transit 1B, fue lanzado con éxito el 13 de abril de 1960 por un cohete Thor-Ablestar y las primeras pruebas se realizaron en 1960. El Transit entró en servicio en 1964. De finales de los 50 y principios de los 60 también es el famsoso TACAN o "tactical air navigation system" de uso militar, aunque parte del sistema puede ser utilizado por la aviación civil.
Años 60



Los años 70
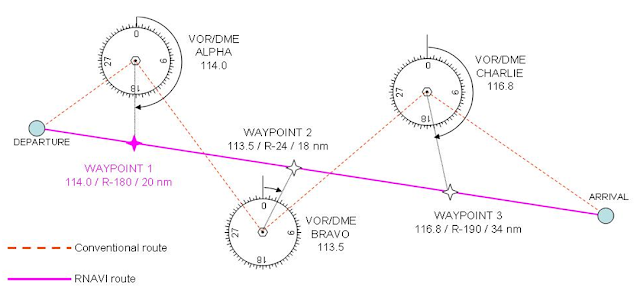
En los años 60 se desarrolla en los USA la navegación de área (RNAV), su puesta en práctica se realiza en los años 70 y se generalizará en los 80. Este moderno sistema de navegación dota a los pilotos de una gran flexibilidad a la hora de decidir la ruta que desean volar, ya que no se ven obligados a sobrevolar las radioayudas convencionales.
Definición de RNAV: La "Navegación de área" (RNAV) puede ser definida como un método de navegación que permite a los aviones operar en cualquier rumbo deseado dentro de la cobertura de las radio ayudas o dentro de los límites de un sistema embarcado autónomo, o combinando ambos. En otras palabras, este sistema de navegación IFR nos permite elegir cualquier rumbo dentro de la cobertura de las ayudas en tierra, en lugar de volar directamente de una radio ayuda a otra.
En la década de los 70 el sistema de navegación inercial se aplica a la navegación aérea. En 1978 se lanza el primer satélite Navstar que daría lugar al GPS. El MLS se establece como un sistema independiente de aterrizaje de precisión alternativo al ILS. Debajo se puede ver una cabina de vuelo de un 747 clásico.


Años 80
La navegación de área se generaliza en todo el mundo, ya no
es necesario volar de estación a estación. Se generaliza también el uso de los
famoso Waypoints o puntos de ruta. Aparecen los primeros sistemas integrados
FMS+IRS (también los GPS +IRS) y comienza la revolución del "Glass
Cockpit", con AIBUS a la cabeza. Empiezan a llegar a las cabinas los ND o
Navigation Displays, los PFD y la nueva simbología digital propia de los
sistemas EFIS. También se desarrollan los sistemas de navegación con Bases de
Datos para los sistemas FMS.

En 1983 el presidente Reagan declara que el GPS debe de ser autorizado para su uso civil después del derribo de un avión comercial (KAL007) por parte de la aviación militar de la URSS. En el año 2000 se produce la derogación sine die de la SA o Selective Availability (degradación intencional de la señal GPS). El Congreso de los Estados Unidos declara que la precisión del GPS se incrementa para su uso civil y que la degradación de la señal de forma intencional no se producirá más. En esta década surge también el sistema GLONASS que es el equivalente soviético del GPS.

El concepto de navegación por satélite se amplía y ya se habla de sistemas GNSS. Un sistema GNSS (Sistema Global de Navegación por Satélite) es un conjunto de satélites que transmiten señales para permitir la localización y navegación precisas en cualquier lugar del mundo. Es un término general que engloba a varios sistemas de navegación, como el GPS (EE.UU.), Galileo (Europa), GLONASS (Rusia) y BeiDou (China). Para determinar una posición, un receptor GNSS necesita recibir señales de al menos cuatro satélites y utiliza el principio de la trilateración para calcular la latitud, longitud, altitud y tiempo.
 En la actualidad son habituales las aproximaciones RNP basadas en GNSS +
Aumento de la señal. Las rutas ya no dependen simplemente de sistemas de
radioayudas. Gracias al aumento de precisión en la posición, las distancias
verticales y horizontales se reducen para dar cabida al aumento del tráfico
aéreo. Las rutas RNAV son predecibles y replicables por todos los aviones
capaces de este tipo de navegación. Debajo se puede ver la comparativa entre
las rutas de salida de un aeropuerto voladas antes de la navegación de área
(RNAV) y después.
En la actualidad son habituales las aproximaciones RNP basadas en GNSS +
Aumento de la señal. Las rutas ya no dependen simplemente de sistemas de
radioayudas. Gracias al aumento de precisión en la posición, las distancias
verticales y horizontales se reducen para dar cabida al aumento del tráfico
aéreo. Las rutas RNAV son predecibles y replicables por todos los aviones
capaces de este tipo de navegación. Debajo se puede ver la comparativa entre
las rutas de salida de un aeropuerto voladas antes de la navegación de área
(RNAV) y después.
El término Navegación de área (RNAV) se define en el Anexo 11 de la OACI: Un método de navegación que permite la operación de la aeronave a lo largo de cualquier ruta de vuelo deseada dentro de la cobertura de ayudas de navegación terrestres o espaciales o dentro de los límites de la capacidad de las ayudas autocontenidas, o una combinación de estos.

Comparativa técnica entre el ILS, MLS y GLS (GBAS)

- ILS: σ_LOC = 2.9 m, σ_GS = 1.9 m
- GBAS: σ_LAT = 0.1 m, σ_VERT = 0.4 m → guiado 5-7× más estable y con menos ruido .
- ILS solo permite linea recta; MLS y GBAS permiten trayectorias curvas, segmentadas o con GPA variables .
- ILS necesita dos transmisores calibrados por extremo de pista.
- MLS requiere antena de barrido por cada sentido.
- GBAS utiliza una sola estación para todo el aeropuerto y puede definir hasta 26 procedimientos distintos .
- ILS: CAT I/II/III plenamente operativas.
- MLS: CAT I-III aprobadas teóricamente; pocos aeropuertos equipados.
- GBAS: CAT I aprobada (ICAO Annex 10); estándares CAT II/III en desarrollo, con validaciones de 2023-25 .
- ILS/MLS: interferencias locales, reflexiones, terreno.
- GBAS: dependencia GNSS; puede verse afectado por jamming/spoofing, aunque los monitores de integridad alertan en segundos .
- ILS seguirá existiendo por su base instalada y certificación CAT III.
- MLS queda relegado a nichos militares.
- GBAS/GLS es el sistema preferido para nuevas pistas gracias a su precisión, flexibilidad y menores costes de mantenimiento; se espera certificación CAT II/III antes de 2030 .
- Estudio DLR vuelos A320 – comparación ILS vs GBAS.
- Wikipedia – ILS & GBAS infrastructure.
- AviationHunt – Guía de aproximaciones y flexibilidad GBAS.
- Artículo IJSRET – comparativa ILS/MLS/GBAS.
- Airhead ATPL – precisión y ventajas operativas de GBAS.
- está relacionada con la precisión angular y la sensibilidad de visualización,
- depende de la altitud (altitud mínima en ruta, MEA),
- depende de la ubicación de la instalación de radio y
- se basa en una infraestructura costosa.
- Gran precisión lineal y sensibilidad de visualización,
- estructura flexible de la vía aérea no vinculada a las ubicaciones de las instalaciones,
- establecimiento de rutas más directas que permitan reducir la distancia de vuelo
- establecimiento de rutas duales o paralelas para acomodar un mayor flujo de tráfico en ruta - establecimiento de rutas de derivación para aeronaves sobre áreas terminales de alta densidad de vuelo
- establecimiento de alternativas o rutas de contingencia sobre una base planificada o ad hoc
- establecimiento de ubicaciones óptimas para mantener patrones de vuelo repetibles
- infraestructura flexible no vinculada a un NAVAID específica
- reducción en el número de instalaciones de navegación terrestre
- Un sistema 2D RNAV es capaz de realizar RNAV en el plano horizontal.
- Un sistema 3D RNAV es capaz de realizar RNAV en el plano horizontal y en el plano vertical.
- System Un sistema 4D RNAV es capaz de realizar RNAV en el plano horizontal, en el plano vertical y tiene una función de temporización.
- NDB (requiere infraestructura terrestre) (no se usa en PBN)
- VOR (requiere infraestructura terrestre)
- DME (requiere infraestructura terrestre)
- Doppler (sistema autónomo) (no se usa en PBN))
- INS/IRS (sistema autónomo)
- GNSS (sistema pasivo, requiere de una constelación de satélites)
- Sistemas hiperbólicos (requieren infraestructura terrestre) (no se usa en PBN))
Debajo se pueden ver los mínimos de todos los sistemas.Los dos últimos no pertenecen a la PBN.






{kind=link}
EXCELENTE
ResponderEliminarMuchas gracias Francisco :)
EliminarMuchas gracias.me fue de gran ayuda
ResponderEliminarMe alegro mucho. Un cordial saludo
EliminarManolo
Esta pagina no contiene información muy útil, solo es una propaganda para que compren el libro.
ResponderEliminarQuerido lector, le ruego que haga un poco de introspección y medite su comentario de forma crítica después deleer esto.
EliminarMucha gente piensa (sobre todo desde el anonimato) que el "todo gratis" es un derecho del Internauta, pero no es así. Imagino que usted es una persona que ya se habrá dado cuenta de que la buena información en Internet es de pago (periódicos, tesis doctorales, trabajos de investigación y un largo etc).
Existen muy pocas páginas con tanta información como la que se puede encontrar en este Blog, que sean abiertas, gratis y sin publicidad. Aproveche lo que se le ofrece aquí. Como dice el famoso refrán, "...a caballo regalado no le mires el dentado". Yo no le pido que me lo agradezca ni que compre mis libros. Tampoco le pido que visite el Blog ni que me deje comentarios.
De todas formas, Si realmente está interesado en este post, y quiere acceder a la información sin pagar, ...le voy a enseñar como puede hacerlo sin que sirva de precedente: vaya a la plataforma donde se vende el libro. Pinche en echar un vistazo a su interior y ya puede leer el artículo y otras cosas gratis. Puede hacer esto en todos los libros que tengo publicados.
Un cordial saludo
Manuel